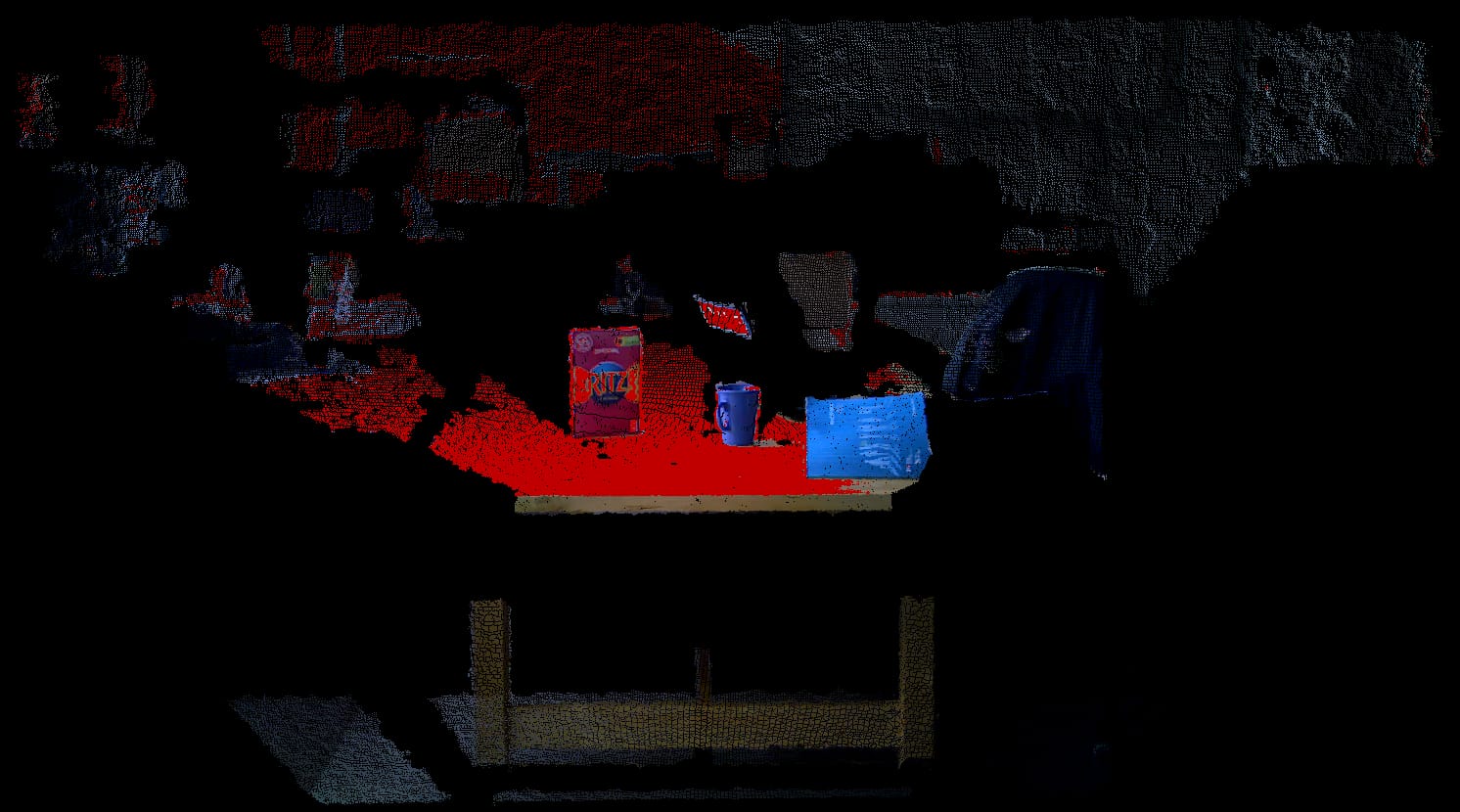
This project focuses on identifying possible drop points for a robot to place an object using a point cloud obtained from an RGB-D sensor. The sensor, mounted on the robot (Lucy), captures color and depth information, which is then processed to determine suitable locations for object placement.
Dependencies
- Python 3
- NumPy
- Matplotlib
- SciPy
- Point Cloud Library (PCL)
Methodology
- The point cloud (cloud.pcd) is transformed based on the camera’s pose relative to the robot’s base.
- Points are then ranked using a point ranking algorithm, considering their angles with respect to the Z-axis.
- The output is visualized in a 3D plot, where suitable drop points for object placement are highlighted in red.
Github repository: The repository can be found here